Transferlearning 1
![]()
Arquitetura de Redes Neurais Convolucionais¶
Existem diversas arquitetura de CNN, cada rede com suas próprias características, principalmente para visão computacional. Mas todas terão em comum camadas de convolução e maxpooling, dropout e algumas coisas a mais...
Por que utilizar uma arquitetura CNN¶
Utilizar uma arquitetura de CNN possibilita reduzir o tempo de pesquisa com o desenvolvimento de novas arquiteturas uma vez que essas arquiteturas já foram sistematicamente revisadas.
Exemplos de arquiteturas:¶
LeNET: Desenvolvida em 1998 por Yann LeCun, a LeNet foi pioneira no uso de camadas de convolução com filtros 5x5 e passo 1, além de camadas de agrupamento com filtros 2x2 e passo 2, intercaladas por camadas totalmente conectadas (FC). A ordem das camadas é: CONV-POOL-CONV-POOL-FC-FC. Essa arquitetura teve um papel fundamental no reconhecimento de dígitos manuscritos.

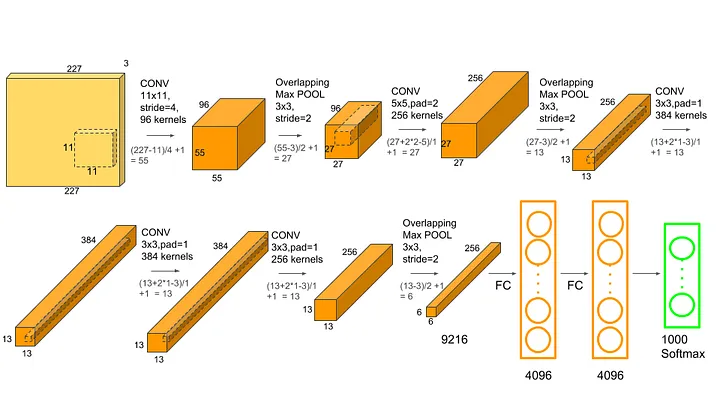
AlexNET: Criada em 2012 por Alex Krizhevsky, Ilya Sutskever e Geoffrey Hinton, a AlexNet é uma arquitetura mais avançada que a LeNet. Possui cinco camadas convolucionais seguidas de três camadas FC, e emprega a função de ativação ReLU. Vencedora da competição ImageNet de 2012, marcou o início da popularização das redes neurais convolucionais profundas.
VGG: A arquitetura VGG, concebida em 2014 pelo Visual Geometry Group da Universidade de Oxford, propôs o uso de filtros menores (3x3) em redes mais profundas, com no mínimo 16 camadas convolucionais e maxpooling com filtros 2x2. Apesar de os filtros menores gerarem menos parâmetros, as camadas FC e as convoluções iniciais demandavam grande quantidade de memória RAM, resultando em uma rede pesada.

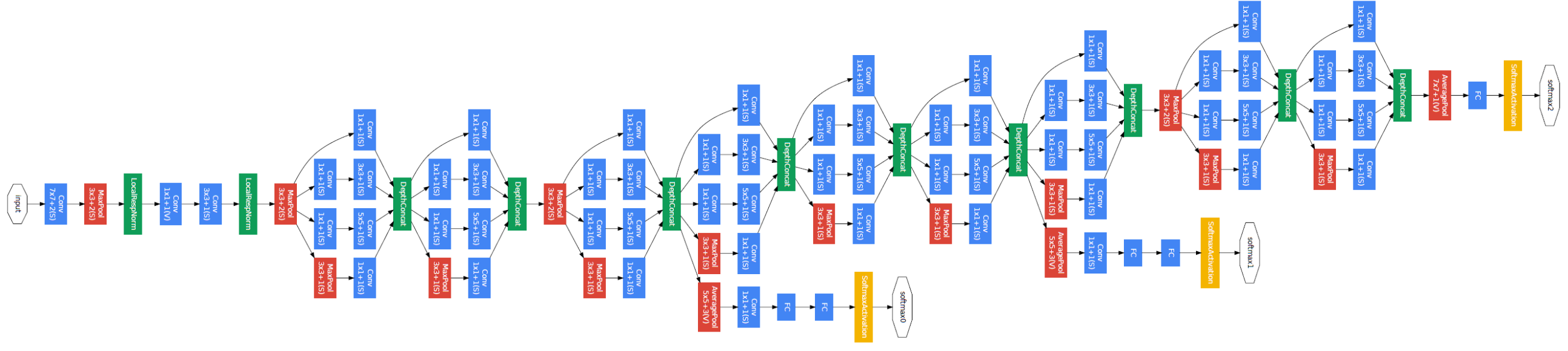
GoogleNET: Paralelamente à VGG, em 2014, pesquisadores do Google desenvolveram a GoogleNet, que introduziu o módulo Inception como elemento fundamental. Com nove módulos Inception em sequência, a arquitetura utiliza convoluções 3x3 e 5x5 precedidas por convoluções 1x1 para diminuir o custo computacional. A GoogleNet foi projetada para ser eficiente em termos de recursos e venceu a competição ImageNet de 2014.
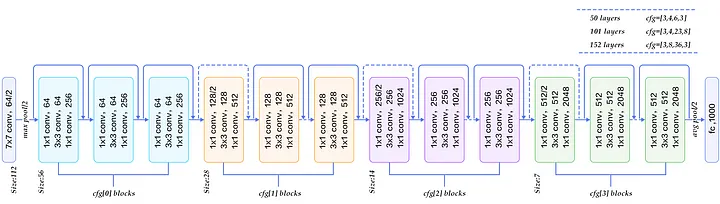
ResNET: A rede residual, proposta em 2015 por Kaiming He e colaboradores, tem como característica principal a inclusão de conexões residuais (curto-circuitos) a cada duas convoluções, adicionando um resultado anterior ao resultado futuro. Isso permite treinar redes mais profundas sem problemas de degradação do desempenho. ResNets com 50, 101 e 152 camadas utilizam blocos residuais com "bottleneck", que consistem em duas convoluções 3x3 intercaladas por convoluções 1x1, diminuindo o custo computacional.
MobileNet: Proposta em 2017, é uma arquitetura otimizada para dispositivos móveis e aplicativos com limitações de recursos computacionais. Utiliza convoluções separáveis por profundidade para reduzir o número de parâmetros e o consumo de memória.
EfficientNet: Proposta em 2019, é uma família de redes neurais convolucionais que busca melhorar a eficiência em termos de recursos computacionais e desempenho, através do ajuste coordenado da largura, profundidade e resolução das redes.
InceptionV3: Uma evolução do GoogleNet, a InceptionV3 é uma arquitetura desenvolvida em 2015 que aprimora o módulo Inception e implementa técnicas de normalização em lotes. Essa arquitetura alcança um desempenho superior com menos parâmetros e menor custo computacional.
DenseNet: Proposta em 2016, a DenseNet é uma arquitetura que introduz conexões densas entre as camadas. Cada camada recebe as características de todas as camadas anteriores, o que melhora o fluxo de informações e gradientes durante o treinamento. Isso permite a construção de redes mais profundas e eficientes.
YOLO (You Only Look Once): É uma arquitetura de rede neural focada em detecção de objetos em tempo real. Proposta em 2016, a YOLO divide a imagem em regiões e prevê, de uma só vez, as probabilidades de classes e as coordenadas das caixas delimitadoras. A YOLO é conhecida por sua velocidade e capacidade de detectar objetos em tempo real.
Transformer: Embora não seja uma arquitetura de rede neural convolucional, o Transformer, proposto em 2017, é uma arquitetura de rede neural notável para processamento de linguagem natural e outras tarefas sequenciais. O Transformer introduziu o conceito de atenção auto-regressiva, que permite que a rede aprenda relacionamentos complexos entre as entradas, e tem sido a base para modelos de linguagem de última geração, como BERT e GPT.
Parace que são muitas, mas essas são apenas algumas arquiteturas de redes neurais desenvolvidas nos últimos anos. Dependendo da aplicação e das restrições de recursos, você pode encontrar uma arquitetura adequada às suas necessidades específicas.
Modelos de CNN pré-treinados¶
O treinamento de uma boa CNN não é simples, além de muitos dados (milhares de imagens) e muito tempo de processamento.
Mas usar essas redes é super super facil!!
Vamos usar o VGG16 para fazer a classificação de uma imagem.
Recomendo dar uma olhada na documentação oficial do Keras: https://keras.io/api/applications/
import numpy as np
from tensorflow.keras.preprocessing import image
## importa o modelo da VGG16 pré-treinado
from tensorflow.keras.applications.vgg16 import VGG16, preprocess_input, decode_predictions
/Users/arnaldoalvesvianajunior/Library/Python/3.9/lib/python/site-packages/urllib3/__init__.py:34: NotOpenSSLWarning: urllib3 v2.0 only supports OpenSSL 1.1.1+, currently the 'ssl' module is compiled with 'LibreSSL 2.8.3'. See: https://github.com/urllib3/urllib3/issues/3020 warnings.warn(
# Carrega o modelo VGG16 pré-treinado com ImageNet:
model = VGG16()
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/vgg16/vgg16_weights_tf_dim_ordering_tf_kernels.h5 553467096/553467096 ━━━━━━━━━━━━━━━━━━━━ 75s 0us/step
import matplotlib.pyplot as plt
# Função para visualizar imagem
def display_image(img_path):
img = image.load_img(img_path)
plt.imshow(img)
plt.axis('off')
plt.show()
# Carrega uma imagem e prepara para ser predita pela VGG16
## teste 1
# !wget https://images.tcdn.com.br/img/img_prod/777105/bicicleta_29_hope_21_velocidades_shimano_freios_disco_tamanho_17_12475_1_ac0b7c63eee851b87bcc9832033c9826.jpg -O /content/bike.jpg
# img_path = 'bike.jpg'
# teste 2
#!wget https://liberal.com.br/wp-content/uploads/2019/11/buraco-rua-dos-anturios.jpg -O /content/buraco.jpg
#img_path = 'buraco.jpg'
# teste 3
#img_path = 'COLOQUE_UMA_IMAGEM.jpg'
# se estiver rodando localmente, descomente a linha abaixo
#img_path = 'COLOQUE_UMA_IMAGEM.jpg'
img_path = 'bicicleta.png'
img = image.load_img(img_path, target_size=(224, 224))
x = image.img_to_array(img)
x = np.expand_dims(x, axis=0)
x = preprocess_input(x)
print("A imagem é carregada e transformada de {}, para {}".format(img.size,x.shape))
display_image(img_path)
A imagem é carregada e transformada de (224, 224), para (1, 224, 224, 3)

## faz a predição da imagem
preds = model.predict(x)
1/1 ━━━━━━━━━━━━━━━━━━━━ 0s 327ms/step
decoded_preds = decode_predictions(preds)[0]
for i, (imagenet_id, label, score) in enumerate(decoded_preds):
print(f"{i+1}. {label}: {score * 100:.2f}%")
Downloading data from https://storage.googleapis.com/download.tensorflow.org/data/imagenet_class_index.json 35363/35363 ━━━━━━━━━━━━━━━━━━━━ 0s 1us/step 1. mountain_bike: 82.86% 2. alp: 3.89% 3. crash_helmet: 1.95% 4. bicycle-built-for-two: 1.51% 5. tricycle: 1.51%
Desafio 1¶
Agora avalie outras arquiteturas de redes neurais disponíveis no Keras, como ResNet50, InceptionV3, MobileNet e EfficientNet.
Basta substituir a importação e a função de carregamento do modelo conforme necessário. Por exemplo, para usar a ResNet50:
from tensorflow.keras.applications.resnet50 import ResNet50, preprocess_input, decode_predictions
model = ResNet50(weights='imagenet')
#### seu código aqui....
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/resnet/resnet50_weights_tf_dim_ordering_tf_kernels.h5 102967424/102967424 [==============================] - 5s 0us/step